
目录
快速导航-
计算机科学与应用 | 基于Piecewise映射的安全密文域可逆信息隐藏算法
计算机科学与应用 | 基于Piecewise映射的安全密文域可逆信息隐藏算法
-
计算机科学与应用 | 改进CapsNet的文本自杀风险检测模型
计算机科学与应用 | 改进CapsNet的文本自杀风险检测模型
-
计算机科学与应用 | 基于ZYNQ⁃7000的飞控计算机PC/104总线数传链路设计
计算机科学与应用 | 基于ZYNQ⁃7000的飞控计算机PC/104总线数传链路设计
-
计算机科学与应用 | 基于改进沙猫群算法优化CNN⁃BiLSTM的热负荷预测
计算机科学与应用 | 基于改进沙猫群算法优化CNN⁃BiLSTM的热负荷预测
-
计算机科学与应用 | Web前端组件中的跨站脚本攻击检测算法研究
计算机科学与应用 | Web前端组件中的跨站脚本攻击检测算法研究
-
计算机科学与应用 | 基于长短期记忆网络的无线通信智能抗干扰研究
计算机科学与应用 | 基于长短期记忆网络的无线通信智能抗干扰研究
-

计算机科学与应用 | 融合实体语义的实体关系抽取联合解码
计算机科学与应用 | 融合实体语义的实体关系抽取联合解码
-
电子与信息器件 | 基于模糊自抗扰的PEMFC输出电压控制研究
电子与信息器件 | 基于模糊自抗扰的PEMFC输出电压控制研究
-
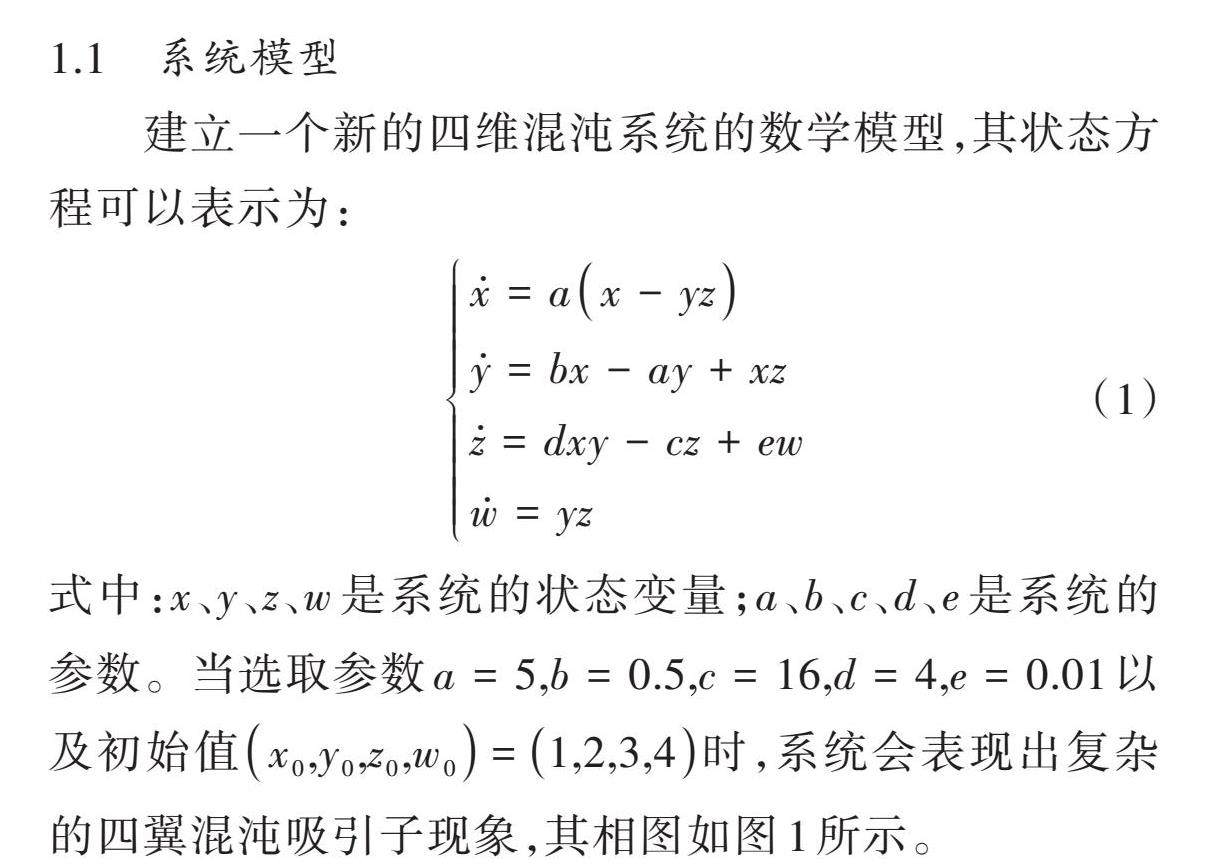
电子与信息器件 | 吸引子共存的四维多稳态混沌系统及同步电路
电子与信息器件 | 吸引子共存的四维多稳态混沌系统及同步电路
-
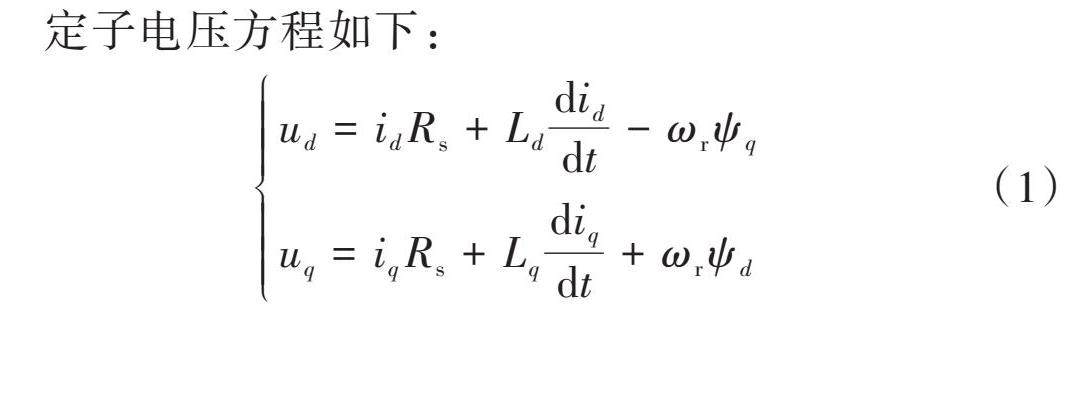
电子与信息器件 | 基于改进MRAS的永磁同步电机滑模速度控制设计
电子与信息器件 | 基于改进MRAS的永磁同步电机滑模速度控制设计
-
电子与信息器件 | 基于时钟抖动流水线结构的高效率真随机数发生器
电子与信息器件 | 基于时钟抖动流水线结构的高效率真随机数发生器
-
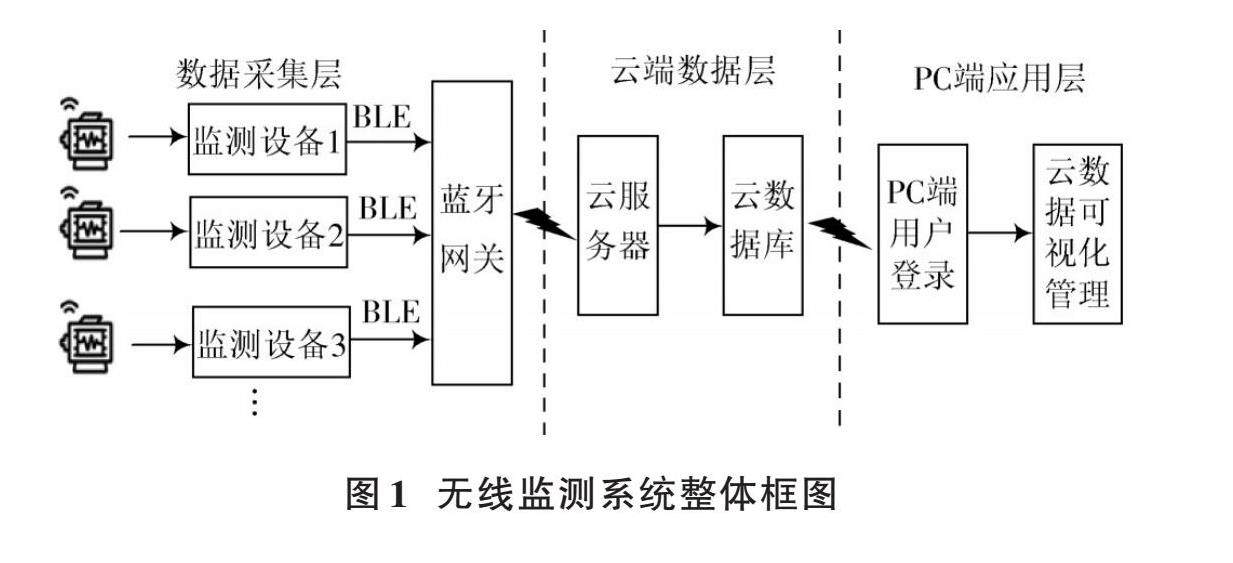
电子与信息器件 | 基于物联网和蓝牙通信的无线电机监测设备设计及应用
电子与信息器件 | 基于物联网和蓝牙通信的无线电机监测设备设计及应用
-
电子与信息器件 | Ku/Ka/W三频段单馈源反射面天线设计
电子与信息器件 | Ku/Ka/W三频段单馈源反射面天线设计
-
电子与信息器件 | 卡尔曼滤波改进虚拟同步机控制研究
电子与信息器件 | 卡尔曼滤波改进虚拟同步机控制研究
-
电子与信息器件 | 一种抗高过载电机设计与控制策略研究
电子与信息器件 | 一种抗高过载电机设计与控制策略研究
-
航空航天航海技术 | 基于ESP32的大田水肥一体化控制系统设计
航空航天航海技术 | 基于ESP32的大田水肥一体化控制系统设计
-
航空航天航海技术 | 基于混合滤波与多环控制的无人机跟降方法
航空航天航海技术 | 基于混合滤波与多环控制的无人机跟降方法
-
航空航天航海技术 | 水下软体蛇三维转向机构设计及仿真
航空航天航海技术 | 水下软体蛇三维转向机构设计及仿真
-
能源技术 | 基于NNC法的含电解铝系统多目标优化
能源技术 | 基于NNC法的含电解铝系统多目标优化
-
能源技术 | 排水管道声呐成像检测中换能器阻抗匹配技术研究
能源技术 | 排水管道声呐成像检测中换能器阻抗匹配技术研究
-
前沿交叉科学 | 基于改进YOLOv5s的建筑护栏目标检测
前沿交叉科学 | 基于改进YOLOv5s的建筑护栏目标检测
-
前沿交叉科学 | 基于机器学习的城市道路交通拥塞状态识别方法
前沿交叉科学 | 基于机器学习的城市道路交通拥塞状态识别方法
-
前沿交叉科学 | 上肢康复机械臂运动学和力学模型建立与分析
前沿交叉科学 | 上肢康复机械臂运动学和力学模型建立与分析
-
前沿交叉科学 | 基于深度学习的汽车防追尾预警系统设计
前沿交叉科学 | 基于深度学习的汽车防追尾预警系统设计
-
前沿交叉科学 | 基于单片机的花生覆膜播种机监测系统研究
前沿交叉科学 | 基于单片机的花生覆膜播种机监测系统研究
-
前沿交叉科学 | 视觉⁃语言多模态下的多任务人脸年龄估计
前沿交叉科学 | 视觉⁃语言多模态下的多任务人脸年龄估计
-

人工智能 | 基于ChatGLM的水生动物疾病诊断智能对话系统的优化研究
人工智能 | 基于ChatGLM的水生动物疾病诊断智能对话系统的优化研究
-
人工智能 | 抵抗推理攻击的车联网位置隐私增强方法
人工智能 | 抵抗推理攻击的车联网位置隐私增强方法
过往期刊
更多-

现代电子技术
2024年22期 -

现代电子技术
2024年21期 -

现代电子技术
2024年20期 -

现代电子技术
2024年19期 -

现代电子技术
2024年18期 -

现代电子技术
2024年17期 -

现代电子技术
2024年16期 -

现代电子技术
2024年15期 -

现代电子技术
2024年14期 -

现代电子技术
2024年13期 -

现代电子技术
2024年12期 -

现代电子技术
2024年11期 -

现代电子技术
2024年10期 -

现代电子技术
2024年09期 -

现代电子技术
2024年08期 -

现代电子技术
2024年07期 -

现代电子技术
2024年06期 -

现代电子技术
2024年05期 -

现代电子技术
2024年04期 -

现代电子技术
2024年03期 -

现代电子技术
2024年02期 -

现代电子技术
2024年01期







 登录
登录