
目录
快速导航-
| 无信号交叉口网联车辆协同碰撞预警研究进展
| 无信号交叉口网联车辆协同碰撞预警研究进展
-
| 基于生态驾驶的自动驾驶汽车交叉路口控制策略研究
| 基于生态驾驶的自动驾驶汽车交叉路口控制策略研究
-

| 基于动态图注意力的车辆轨迹预测研究
| 基于动态图注意力的车辆轨迹预测研究
-
| 基于优化快速搜索随机树算法的全局路径规划
| 基于优化快速搜索随机树算法的全局路径规划
-
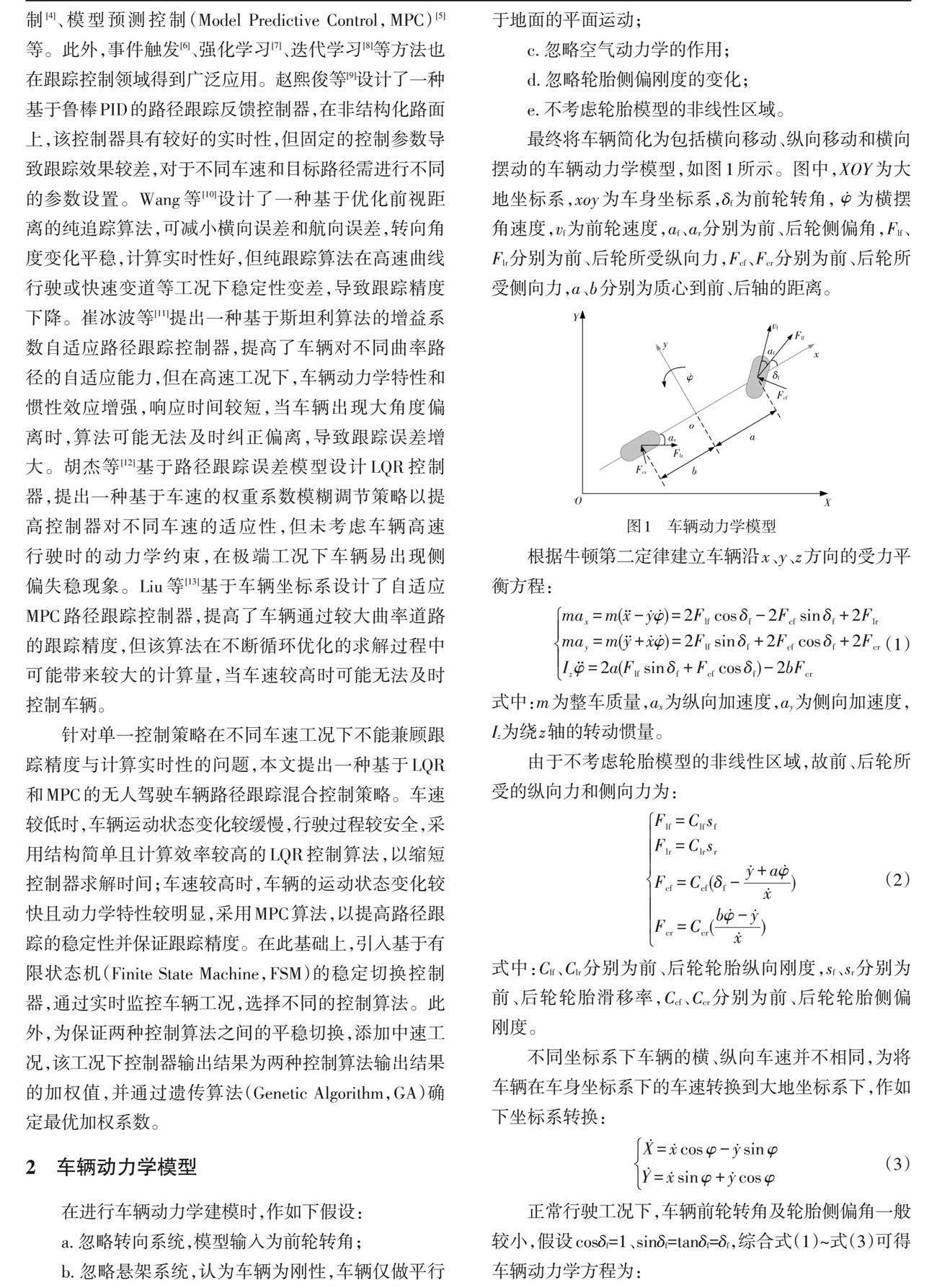
| 无人驾驶车辆路径跟踪混合控制策略研究
| 无人驾驶车辆路径跟踪混合控制策略研究
-
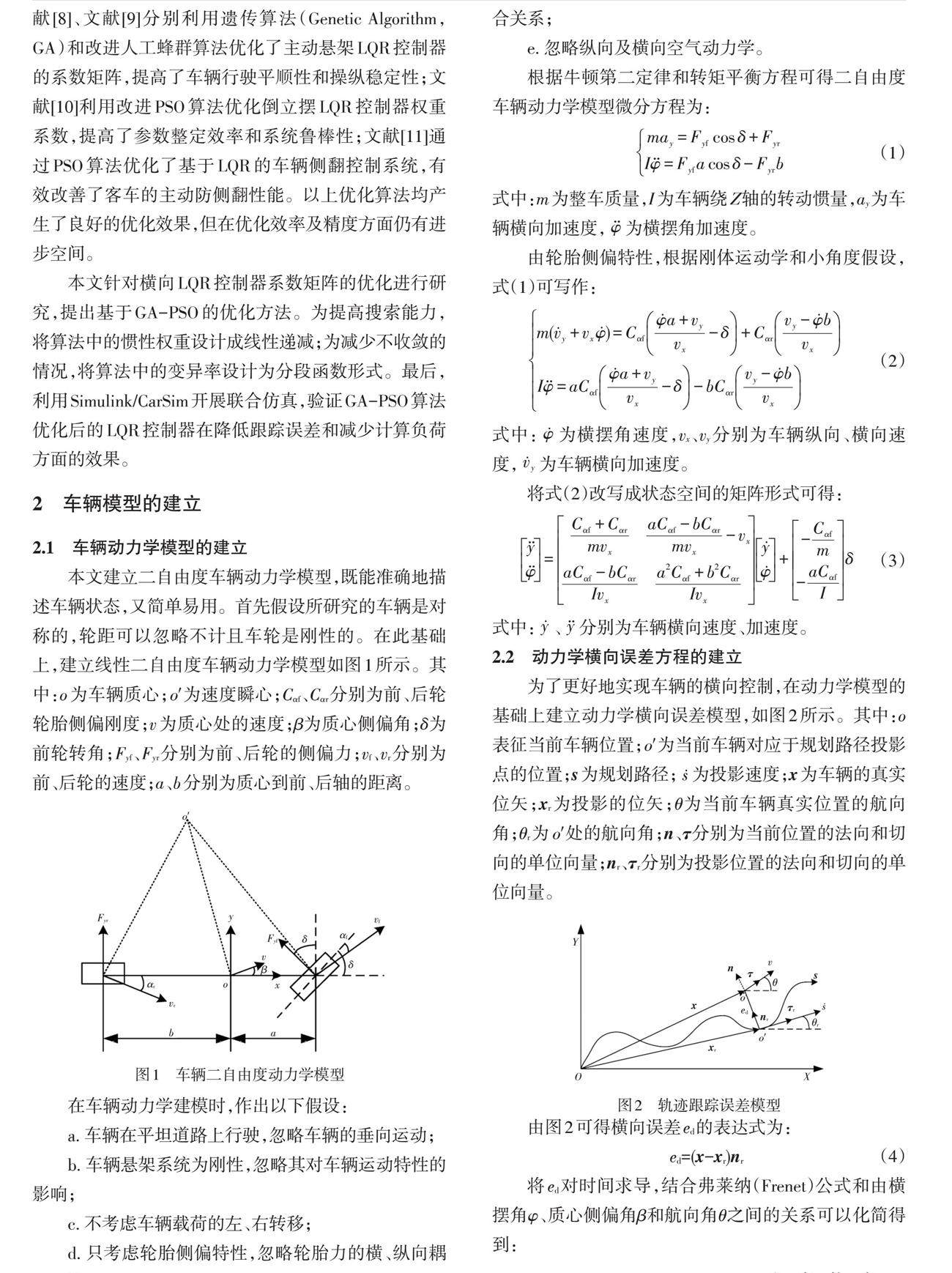
| 基于GA-PSO的智能汽车横向LQR控制器优化设计
| 基于GA-PSO的智能汽车横向LQR控制器优化设计
-
| 公路货运危险驾驶行为智能预测技术研究
| 公路货运危险驾驶行为智能预测技术研究














 登录
登录